全球首个人形机器人小脑GPT模型发布,2万小时训练实现全身实时控制
量级的人形机器人全身实时运控大模型。其能力主要支撑毫秒级时间内完成全身数十个自由度协同控制,在复杂环境中保持平衡、抵抗扰动,以及持续完成高动态、高精度动作任务。架构,将全身控制重新定义为连续序列预测问题,让机器人能够结合动作历史预测未来运动趋势。
全球首个专用小脑大模型诞生
6月19日, “银河通用机器人”官方公众号发布了一则重磅消息, 推出了全球首个人形机器人通用小脑GPT基础模型-WBC 0.5 , 这个模型专门用于处理机器人的身体控制问题, 如同人类小脑负责平衡和协调动作那般 , 它运用了2万小时的人类动作数据进行训练, 参数规模达到8040万, 是行业内首个达到GPT-1量级的人形机器人全身实时运控大模型。
数据量决定机器人表现
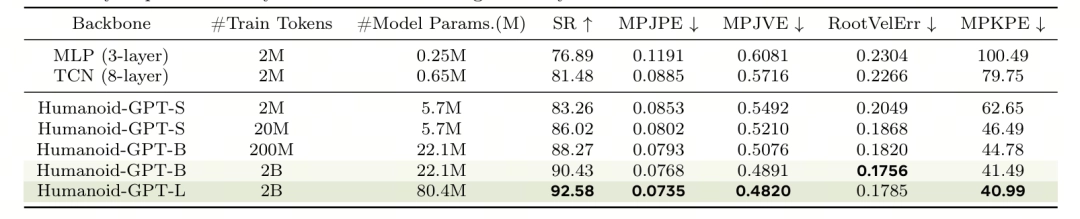
研究团队发现了一项重要规律 , 具体为: 训练数据数量越多 , 机器人所呈现的表现就越好。当训练数据从200万帧由此扩展进而至20亿帧时 , 模型成功率从83.26%得到提升并达到了92.58%。与此同时 , 零样本跟踪误差也处于持续下降的态势。这充分表明在机器人运动控制这一领域 , 同样存在类似GPT的规模法则 , 即数据量乃是能够促使性能得以提升的关键因素。
大脑小脑各有分工
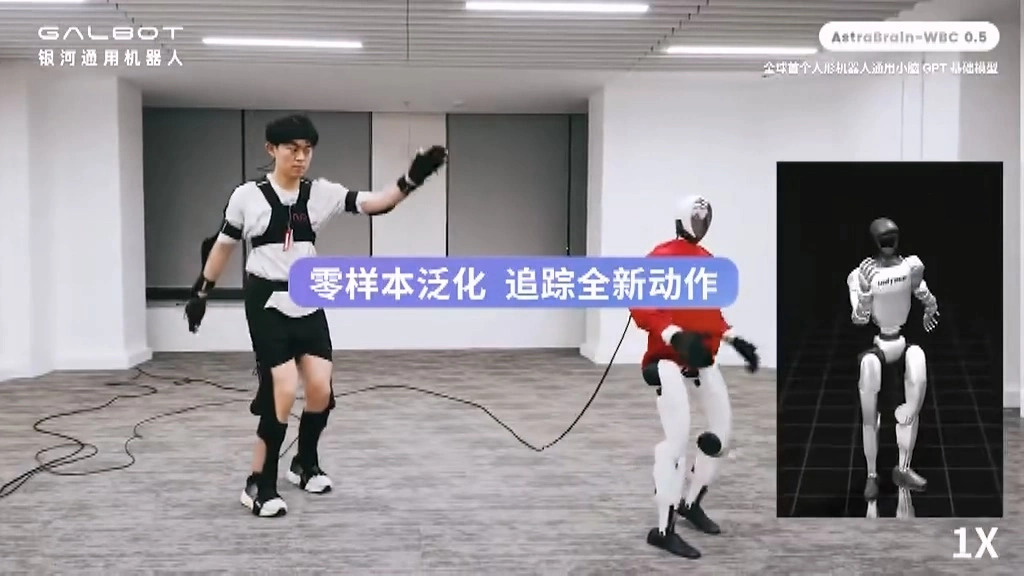
银河通用 team 打了个比方哈, 要是讲 “大脑” 决定机器人怎样去理解世界, 那 “小脑” 就决定机器人怎样在真实世界里行动。大脑处理视觉、语音等高层认知方面的任务, 而后小脑负责在毫秒级时间当中做完全身好几十个自由度的协同控制。比如说在复杂环境之下保持平衡、抵抗外力干扰, 还有持续完成高动态、高精度的动作任务。
因果架构实现连续预测
白细胞计数为0.5采用了GPT风格的因果架构, 将全身控制给重新定义成一个连续序列预测问题, 简单来讲, 便是使机器人如同人类那般, 能够依据过去的动作历史去预测未来的运动趋势, 该种架构使得机器人能够更为自然地做出连贯动作, 并非像传统控制那样需要进行反复计算以及调整。
真实场景中的突破表现
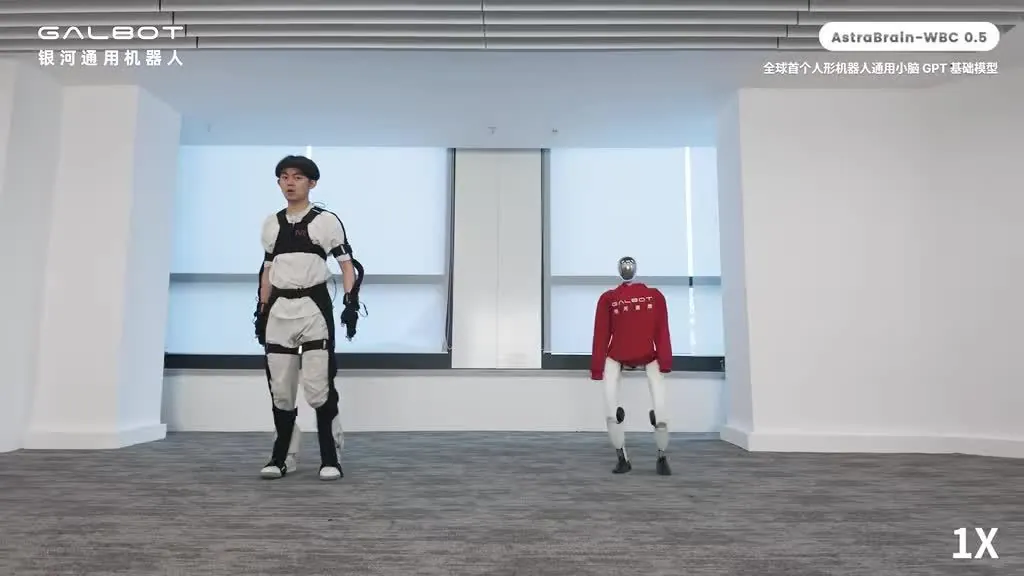
进行测试时, 配备WBC 0.5的机器人可达成一系列高难度动作, 像是遭受外力推搡之际能以快速将平衡恢复, 于崎岖地面之上稳定地行走, 并且能够精准抓取处于移动状态的物体, 以往针对每个场景专门编程方可达成的这些能力, 如今借助一个通用模型便能予以实现, 极大地降低了开发成本以及部署难度。
行业应用前景广阔
银河通用宣称, 此模型能够运用于工业制造、物流配送、家庭服务等诸多领域。举例来说, 于工厂之中, 机器人能够更为灵活地搬运零部件;在仓库里面, 它能够更为稳定地分拣包裹;在家庭场景下, 它能够更为安全地协助老人开展家务劳动。当下团队正同多家企业进行合作洽谈, 预估明年会出现更多实际应用实例。
对于这个技术而言, 你认为在未来它最适宜应用的究竟是哪一个场景呢? 欢迎来到评论区留下你的言论展开探讨, 通过点赞以及分享的行为促使更多的人得以看到这一突破!