
新闻资讯
微软发布全新机器人AI模型Rho-alpha,突破运行局限
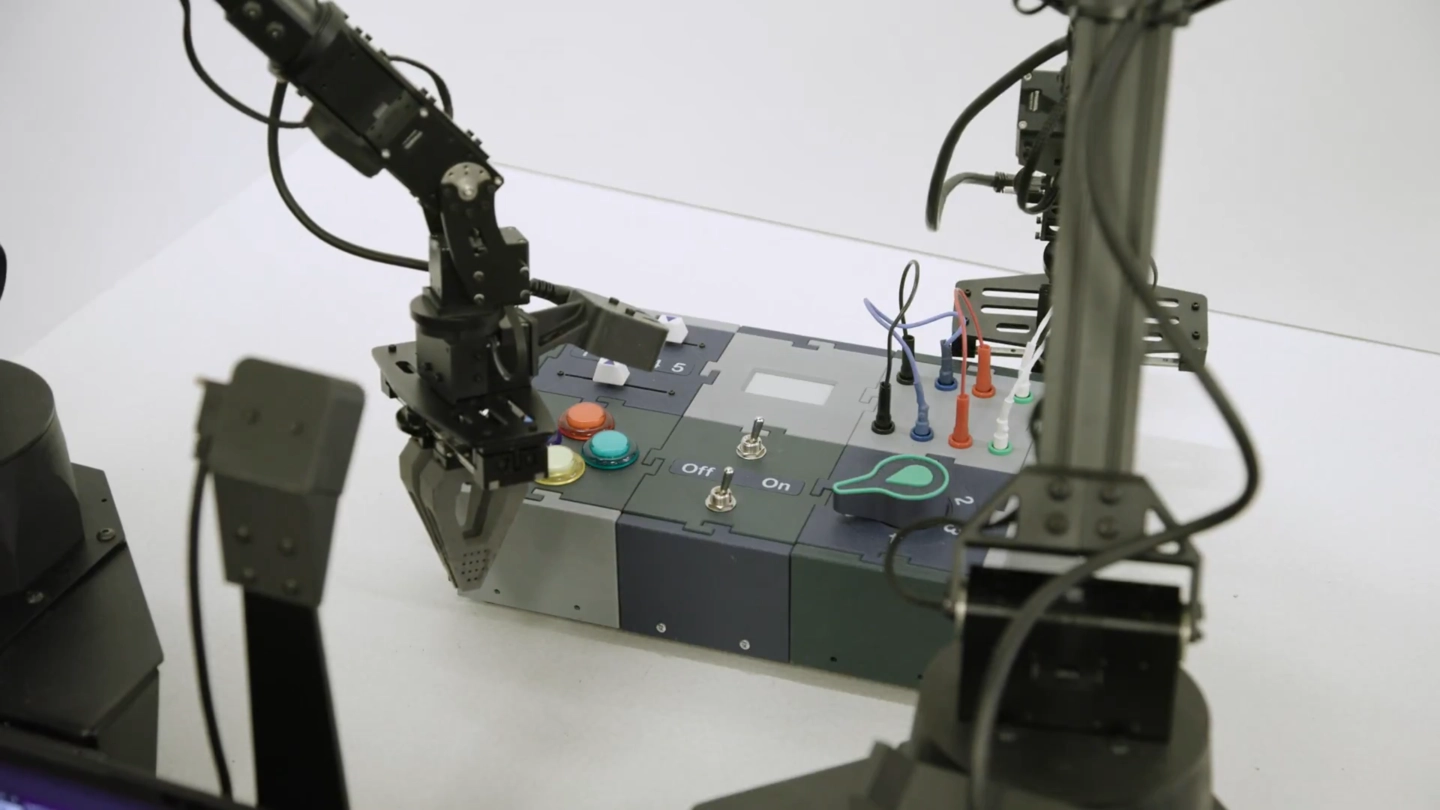
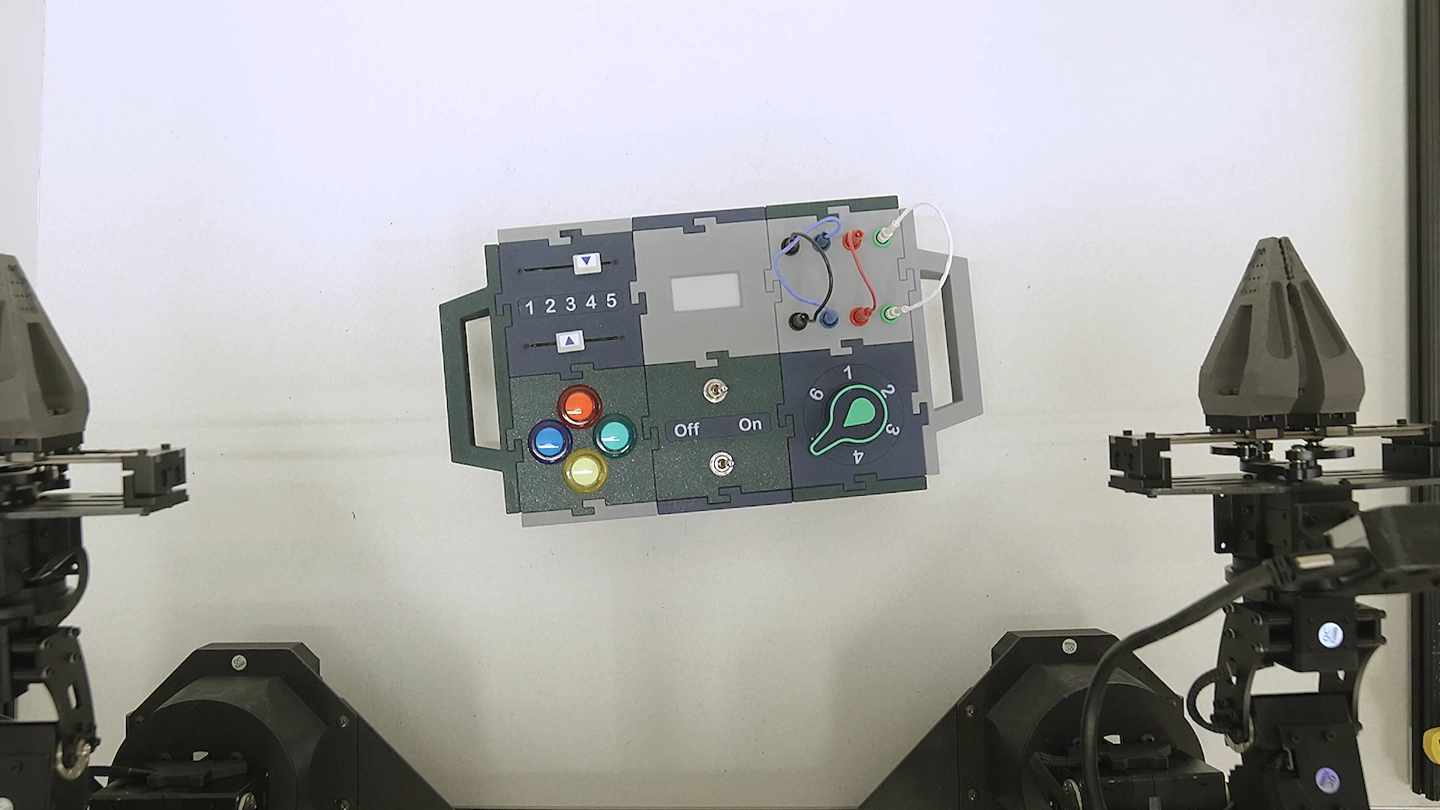
视觉-语言模型家族、专门面向机器人应用打造的系统。目前,微软正在双臂机器人平台和类人机器人上对该系统进行评估测试。注意到,微软同时还在研究部署后持续学习机制,使机器人能够逐步适应不同用户的偏好,从而在实际应用中更易被信任和接受。
一款名为Rho-alpha的新型AI模型,由微软发布,其目标直接指向机器人技术的核心难题,该难题是让机器人走出工厂的“温室”,从而真正融入我们复杂多变的生活和工作环境。

为何机器人难以走出实验室
过去的几十年当中,机器人技术的研究跟应用,存在着一个特别明显的鸿沟。在实验室里边,或者是工厂的流水线上,机器人能够精准且高效地去执行任务。然而,一旦进入到家庭,或者是医院,又或者是仓库等这种非结构化的环境里,它的表现往往是不尽如人意的。这背后的核心原因,在于环境有着高度的不确定性,以及任务具有多样性。传统的工业机器人,依赖精确的预设程序,还有固定的环境参数。可是,真实的世界充满了意外,以及各种各样的变化。比如说,一个在工厂分拣固定零件的机械臂,很难直接就用来整理凌乱的桌面。这种局限性严重制约了机器人的普及和应用范围。
微软研究院的企业副总裁亦表明,跟语言以及视觉AI的迅猛发展相比较而言,机器人技术的进展显得相对迟缓。此差距并非源自硬件,更多是由于软件以及“大脑”的欠缺。机器人于物理世界里的行动,要同时处理感知、规划以及执行,这是个极为复杂的闭环。Rho-alpha模型的推出,恰是微软尝试运用新一代AI技术去填补这一差距,把云端强大的智能与物理世界的实体行动关联起来。
从语言指令到直接控制
Rho - alpha的核心创新处在于,它构建起了一座桥梁,这座桥梁的一端是人类的自然语言指令,另一端是机器人实时的关节运动以及操作信号,这表明,操作者无需再为机器人编写复杂且僵化的控制代码了,你能够直接告知机器人“把桌上的水杯拿过来并拧开盖子”,模型便能领会这话的意图,还会把它拆解成一系列连贯的、需双手协作的物理动作,这大幅度地降低了机器人编程的门槛与成本。
该种能力以微软此前所开发的Phi视觉 - 语言模型家族为根基,Rho - alpha于这个基础之上,特地针对机器人行动展开了优化与训练,它不但需明白“水杯”以及“盖子”是什么(视觉识别方面),还得清楚“拿”和“拧”此类动作在物理空间当中怎样去实现(动作规划方面),这种端到端的控制方式,致使机器人能够应对更为灵活、更为复杂的任务序列,而非重复单一的、预先设定好的动作。
引入触觉感知的关键一步
单一凭借视觉方面的信息,那是远远不足够的。于实际真实的操作情形当中,触觉所给予的反馈是极为关键重要的。当你伸出手去拿取一个玻璃杯之际,你的手指会察觉到杯壁的那种光滑程度以及硬度状况,依照此来自动作出握力的调整。Rho-alpha模型把触觉感知的能力进行了整合融汇,使得机器人同样能够达成这样的行为表现;在开展执行任务的过程之时,机器人能够借助指尖部位的传感器去获取触觉方面的相关信息,而且能够在实时的状态下对自身的动作做一些细微的调整 。
举例来说,于抓取一枚易碎的鸡蛋之际,视觉方面的信息协助进行定位,然而触觉方面的信息却保证抓握的力度既不会致使鸡蛋滑落,又不会将其捏碎。微软宣称,未来的版本还会增添力感知等更多的传感模态。这致使机器人的操作更为精细且安全,特别适用于需要与人类进行近距离协作或者处理精密物品的场景,像是医疗辅助或精密装配 。
具备动态调整与学习能力
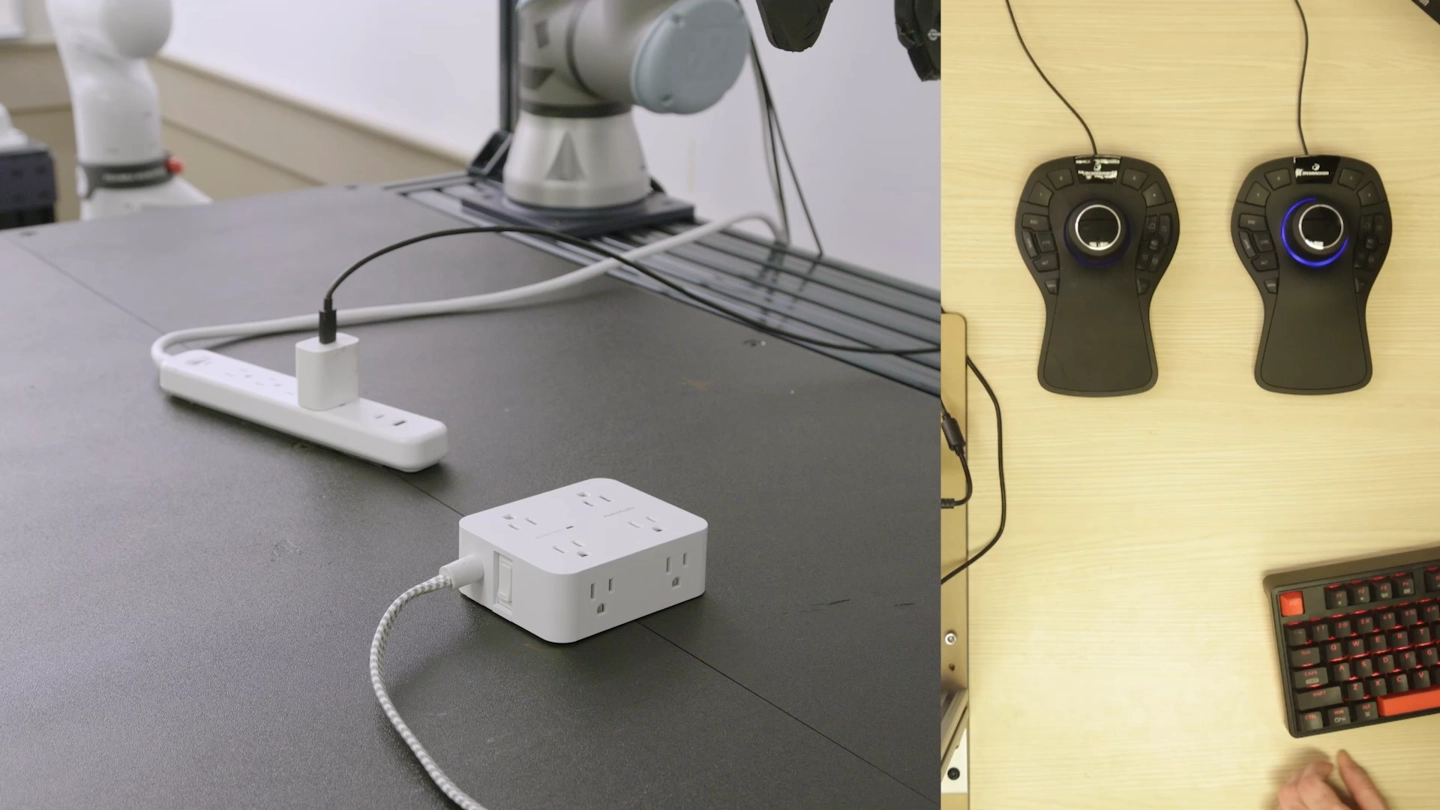
并非一个“死板”的执行程序的是Rho-alpha,它在运行时能够依据实际情形动态调整自身行为,不会完完全全将训练里学到的模式照抄照搬,更为关键的是,它拥有在任务执行期间向人类学习的本领,当机器人出现操作失误状况时,人类操作员能够借助像3D空间鼠标这类直观的工具来实施干预以及进行纠正。
系统会把这种纠正反馈纳入学习进程,进而达成即时改进, 微软仍在探讨投入使用后的持续学习机制, 这表明,一台安置于家庭里的机器人,能够渐渐顺应特定家庭成员的喜好以及生活习性, 比如,它或许会知悉主人习惯把水杯放置在茶几的哪处位置,又或者拧瓶盖时习惯用的力度, 这种个性化的适应本领,是机器人获取人类信赖并被普遍接纳的关键根基 。
破解数据稀缺的难题
AI模型具备强大能力离不开高质量数据进行喂养,机器人领域在长期以来一直面临着训练数据稀缺这样的困境,单纯凭借人工远程操控机器人去采集演示数据,成本方面高昂并且效率十分低下,特别是针对复杂的双手协同任务而言,为了能够解决这个问题,Rho-alpha采用了混合数据训练策略。
它的训练数据来源分三部分,有真实机器人演示的少量高质量数据,有大量由仿真环境生成的合成数据,还有来自互联网的大规模视觉 - 问答数据。微软借助其Azure云基础设施,运作了大规模的机器人仿真和强化学习流程,产出了海量的合成任务数据。这些数据与真实数据相融合,一同“喂养”模型,让其学到更广泛的任务以及应对不同环境变化的能力。
走向开放与未来的影响
首先于研究型早期访问计划,微软针对学术界以及合作机构,开放Rho-alpha,后续还会给出更广泛的使用渠道。这一行为的目的在于,吸引更多开发者,在这个平台之上进行创新。从总的战略层面来看,Rho-alpha属于微软“物理AI”战略里关键的一步棋,这意味着它把AI能力,从单纯的虚拟数字空间,朝着同现实世界交互的智能体展开了延伸 。
从长远的角度去看,微软有着这般的期望,那便是为机器人厂商以及系统集成商给予一个具备着高自主性、可定制化特性的AI训练平台连同工具 。要是Rho-alpha以及其后续的发展能够达成成功的状态,那就将会有着重塑机器人开发范式的可能性,会加速各类服务机器人和协作机器人在物流、零售、医疗、家庭等场景中的普及进程,把人机协作的方式予以深刻地改变 。
您觉得,像Rho - alpha那般能够领会以及施行繁杂语言指令的机器人,最初会于哪个行业或者生活场景当中展开大规模的普及呢?是仓储物流领域、家庭服务范畴,还是医疗康复方面呢?欢迎在评论区去分享您的看法,要是认为分析具备启发性,同样也请点赞予以支持。